
空间物流机器人产品家族图谱 将传统的地面仓储转移到空中,彻底脱离地面的束缚,采用降维的无柜控制系统在成本和效率上碾压传统的地面物流方式
这将改变物流领域的仓储格局。 
这将改变物流领域的仓储格局。
双臂系列
-
 t800
t800- 最大跨度:36m
- 行走距离:200m
- 最大负载:5t
- 手臂行程:4.8~6.2m
- 货物堆叠高度:4.5~6m
- 厂房高度:9-13m
-
 t800-md
t800-md- 最大跨度:36m
- 行走距离: 200m
- 最大负载:10t
- 手臂行程:2.5~3.1m
- 货物堆叠高度:4.5~9m
- 厂房高度:6-13m
-
 t800-mini
t800-mini- 最大跨度:12m
- 行走距离: 200m
- 最大负载:1.5t
- 手臂行程:3m
- 厂房高度:5m

- 最大跨度:18m
- 行走距离:200m
- 最大负载:3t
- 手臂行程:4.8m
- 厂房高度:11m
- 最大跨度:9m
- 行走距离:200m
- 最大负载:0.3t
- 手臂行程:2.5m
- 厂房高度:5m
- 最大跨度:15m
- 行走距离:200m
- 最大负载:1.5t
- 手臂行程:3m
- 厂房高度:6m
单臂系列
-
 t200型
t200型- 最大跨度:30m
- 行走距离: 200m
- 最大负载:3t
- 手臂行程:2~4.5m
- 厂房高度:6~8m
-
 t700型
t700型- 最大跨度:36米
- 负载: 5~10吨
- 手臂行程:2~6米
- 厂房高度: 9~13米
-
 t900型
t900型- 最大跨度:30m
- 行走距离: 200m
- 最大负载:1.5t
- 手臂行程:6m
- 厂房高度:8m
-
伺服立体仓库
 s1500型
s1500型- 高度:3~40m
- 负载: 50~10000kg
- 水平速度:180m/min
- 提升速度:45~60m/min
-
滚筒式装车机器人
 l7型
l7型- 行程:17.5m
- 装车宽度: 2.25~2.5m
- 装车高度:1.15~1.65m
- 最大负载:35t
- 输送速度:15m/min
-
货叉式装车机器人
 m7型
m7型- 货叉速度:15m/min
- 货叉行程: 17.5m
- 装车高度:1.1~1.6m
- 最大负载:35t
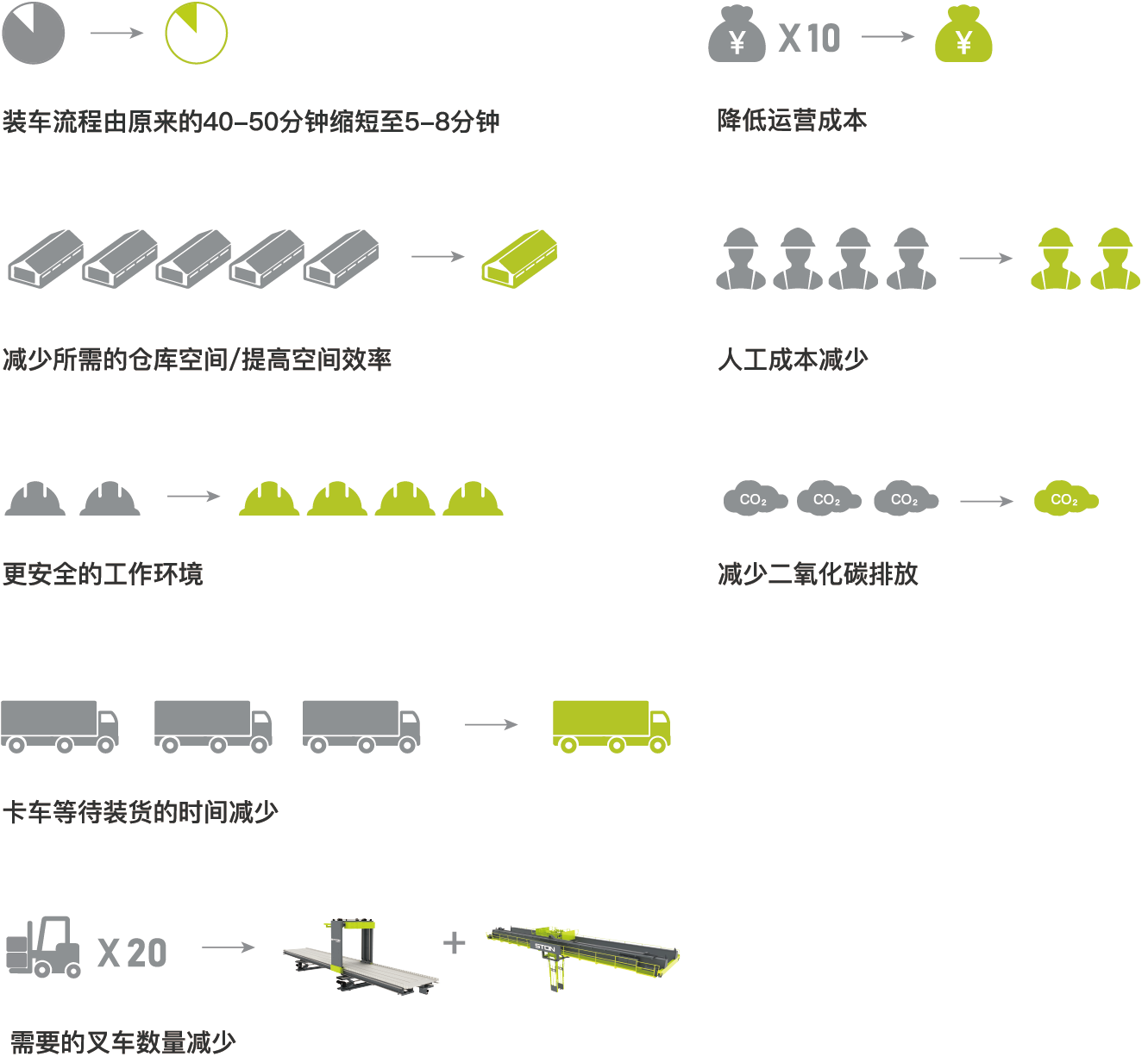
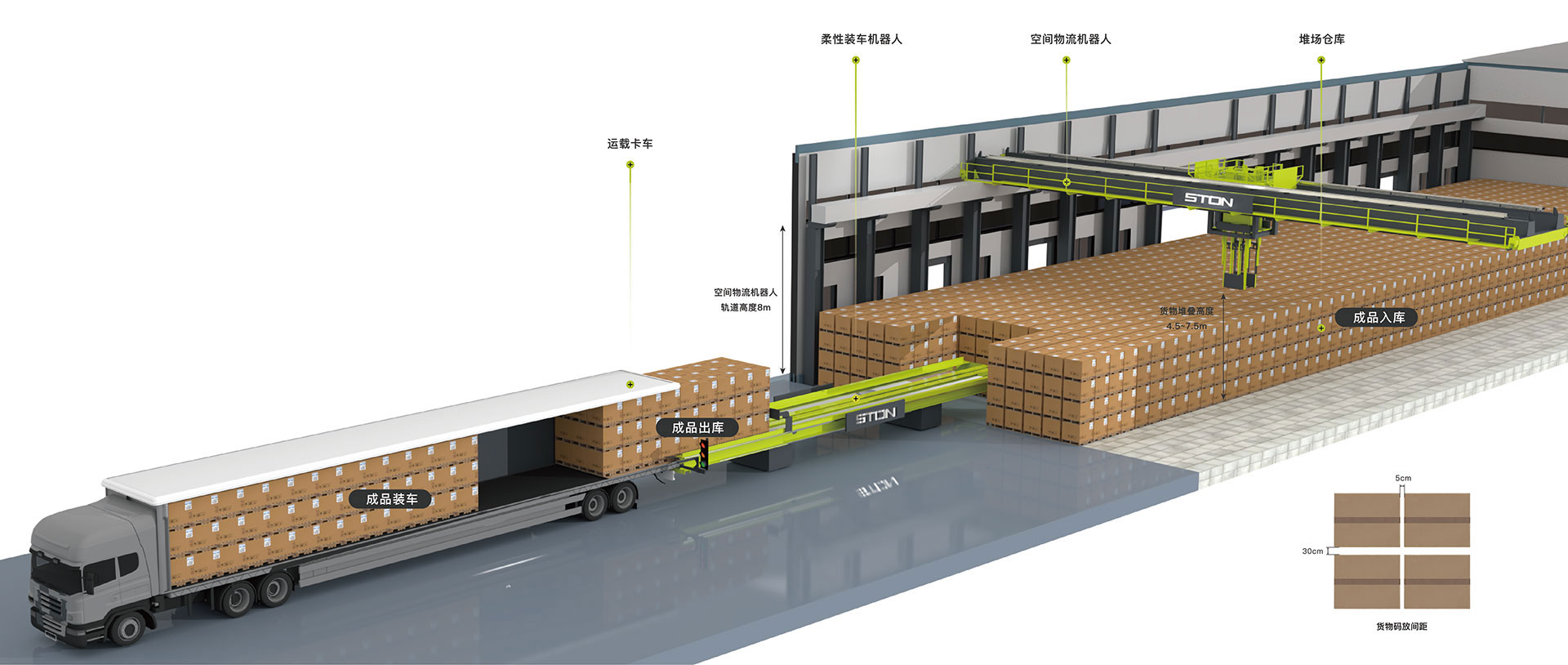
空间物流机器人引领的时代改革  用于堆场物流分拣的空间物流机器人,彻底颠覆传统人工叉车分拣的模式,填补国内外空白,采用降维打击的思路,把最先进的技术进行封装,将非常复杂的工业机器人系统制作成类似于家电一样简单易用的标准产品,在成本和效率上碾压传统的物流方式。
用于堆场物流分拣的空间物流机器人,彻底颠覆传统人工叉车分拣的模式,填补国内外空白,采用降维打击的思路,把最先进的技术进行封装,将非常复杂的工业机器人系统制作成类似于家电一样简单易用的标准产品,在成本和效率上碾压传统的物流方式。
- 基建成本低,应用场景标准化
适合各种叉车搬运式的仓库、货场、堆场,原则上只需要一片空地即可,而且是即插即用,不需要停工停产,因为对场地的基建要求非常低:标准厂房、简易的大棚、甚至是一片户外的空地都可以建成全无人的仓库,大大降低了基建的成本。
- 无货架的立体存储方式
利用巧固框、巧固架、托盘、周转箱等载体,实现货物密集阵列式的自堆叠立体存储方式。
- 密集阵列式存储,叉车堆场3倍的存储能力
货物采用密集阵列方式堆放 (每列相邻货物间距30cm,每行货物间距5cm),无需预留叉车通道和周转空间,货物堆叠高度4.5~7.5米(综合存储能力是普通又车堆场的3倍以上)。
空中仓库 air warehouse
空中分拣智能仓库和传统方式综合成本对比
| 类别 | 项目 | 叉车平库 | 自动立库 | 空中物流机器人 |
|---|---|---|---|---|
 |  |  | ||
| 需求与规格 | 托盘个数(个) | 10,000 | 10,000 | 10,000 |
| 托盘规格 | 1200x800x1000 | 1200x800x1000 | 1200x800x1000 | |
| 地面面积使用率 | 39% | 50.00% | 80% | |
| 层数 | 3 | 13 | 6 | |
| 巷道宽(米) | 4 | 1.5 | 0.3 | |
| 单位货架长(米) | 3.14 | 3.14 | 1.20 | |
| 单位货架宽(米) | 1.3 | 1.3 | 0.85 | |
| 单位货架托盘数(个) | 3 | 3 | 1 | |
| 货架面积(平米) | 4536 | 1047 | 1700 | |
| 基建投资 | 总建筑面积 | 11,513 | 2,093 | 2,125 |
| 建筑单价 | 0.20 | 0.45 | 0.20 | |
| 建筑成本(万) | 2,303 | 942 | 425 | |
| 单位用地成本(万/亩) | 100 | 100 | 100 | |
| 总用地成本(万) | 1,727 | 314 | 319 | |
| 基建总成本(万) | 4,030 | 1,256 | 744 | |
| 货架单位成本(元) | 350 | 350 | 500 | |
| 货架投资(万元) | 350 | 350 | 0 | |
| 堆垛机单位成本(万) | 0 | 280 | 300 | |
| 堆垛机投资(万元) | 0 | 1,400 | 300 | |
| 硬件投资 | 其他配套设各(输送及控制系统)(万元) | 0 | 1,500 | 200 |
| 信息系统(仓储管理系统软硬件)(万元) | 150 | 150 | 50 | |
| 叉车单位成本(万元) | 35 | 35 | 35 | |
| 叉车投资(万元) | 525 | 105 | 105 | |
| 硬件总投资(万元) | 1,025 | 3,505 | 1155 | |
| 人力(个数) | 25 | 6 | 2 | |
| 人力成本(万/年) | 250.0 | 60.0 | 20.0 | |
| 能耗费用(万/年) | 46.9 | 72.4 | 24.5 | |
| 硬件年维护费用(万元/年) | 40 | 92 | 17 | |
| 总成本 | 合计(万元) | 11,792 | 9,749 | 3,129 |
- 空间物流机器人 vs 叉车平库
存储1万个1200x1000mm的托盘,叉车平库占地面积1.1万平米,空间机器人只有2000平米,人力只有叉车的10%,能源消耗是叉车的一半,20年的综合使用成本是叉车的1/4.
占地面积人力能源消耗综合成本 - 空间物流机器人 vs 立体仓库
存储1万个1200x1000mm的托盘,立体仓库占地面积和空间机器人都是2000平米左右,人力是立体仓库的1/3,设备投资是立体仓库的30%,能源消耗是立体仓库的1/3,设备维护是立体仓库的1/5,20年的综合使用成本是叉车的1/3.
能耗设备维护设备投资综合成本
t800 双臂型 空间物流机器人
t系列空间物流机器人集成了起重机行业,叉车行业,桁架机器人行业,数控机床行业,伺服控制器行业,软件行业的技术,采用降维打击的思路,把先进的技术进行封装,将非常复杂的工业机器人系统制作成类似于家电一样简单易用的标准产品,效率和价格碾压传统设备。
- 9~13 m
厂房高度
- 5 t
最大负载
- 36 m
最大跨度
- 4.8~6.2 m
手臂行程
-
 无柜控制系统
无柜控制系统 -
 标准化产品,最快一个月交期
标准化产品,最快一个月交期 -
 低成本
低成本 -
 厂房零改造
厂房零改造
 适用包装
适用包装 | 最大负载 | 5t |
|---|---|
| 装机功率 | 100kw |
| x轴行程 | 200m |
| x轴移动速度 | 180m/min |
| x轴加速度 | 0.5m/s2 |
| y轴最大行程 | 27m |
| y轴移动速度 | 60m/min |
| y轴加速度 | 0.5m/s2 |
| z轴最大行程 | 4.8~6.2m |
| z轴移动速度 | 50m/min |
| z轴加速度 | 0.5m/s2 |
| 重复定位精度 | ±5mm |
t800-md 双臂型 空间物流机器人
t系列空间物流机器人集成了起重机行业,叉车行业,桁架机器人行业,数控机床行业,伺服控制器行业,软件行业的技术,采用降维打击的思路,把先进的技术进行封装,将非常复杂的工业机器人系统制作成类似于家电一样简单易用的标准产品,效率和价格碾压传统设备。
- 6~13 m
厂房高度
- 5~10 t
负载
- 36 m
最大跨度
- 2.5~3.1 m
手臂行程
- 无柜控制系统
- 标准化产品,最快一个月交期
- 低成本
- 厂房零改造
适用包装 | 最大负载 | 5~10t |
|---|---|
| 装机功率 | 110kw |
| x轴行程 | 200m |
| x轴移动速度 | 120m/min |
| x轴加速度 | 0.5m/s2 |
| y轴最大行程 | 36m |
| y轴移动速度 | 60m/min |
| y轴加速度 | 0.5m/s2 |
| z轴最大行程 | 2.5~3.1m |
| z轴移动速度 | 50m/min |
| z轴加速度 | 0.5m/s2 |
| 重复定位精度 | ±5mm |
t800-mini 双臂型 空间物流机器人
t800-mini空间物流机器人浓缩t800机型优点,专门针对低矮厂房设计。无需厂房改造,只需3~8米层高即可使用,无需承轨梁,直接地面安装,投入小回报快,特别适合于快消品产业。
- 5 m
厂房高度
- 1.5 t
最大负载
- 12 m
最大跨度
- 3 m
手臂行程
- 无柜控制系统
- 标准化产品,最快一个月交期
-
 3-8米层高厂房可用
3-8米层高厂房可用 -
 无需承轨梁,直接地面安装
无需承轨梁,直接地面安装
适用包装 | 最大负载 | 1.5t |
|---|---|
| 装机功率 | 60kw |
| x轴行程 | 200m |
| x轴移动速度 | 120m/min |
| x轴加速度 | 0.5m/s2 |
| y轴最大行程 | 12m |
| y轴移动速度 | 60m/min |
| y轴加速度 | 0.5m/s2 |
| z轴最大行程 | 3m |
| z轴移动速度 | 24m/min |
| z轴加速度 | 0.5m/s2 |
| 定位精度 | ±5mm |
| 厂房高度 | 5m |
t700 单臂型 空间物流机器人
t系列空间物流机器人集成了起重机行业,叉车行业,桁架机器人行业,数控机床行业,伺服控制器行业,软件行业的技术,采用降维打击的思路,把先进的技术进行封装,将非常复杂的工业机器人系统制作成类似于家电一样简单易用的标准产品,效率和价格碾压传统设备。
- 9~13 m
厂房高度
- 5~10 t
负载
- 36 m
最大跨度
- 2~6 m
手臂行程
- 无柜控制系统
- 标准化产品,最快一个月交期
-
 可选配抓手,多种行业适用
可选配抓手,多种行业适用 -
 空中装车/卸车
空中装车/卸车

| 负载 | 5~10 t |
|---|---|
| 装机功率 | 150kw |
| x轴行程 | 200m |
| x轴移动速度 | 180m/min |
| x轴加速度 | 0.3m/s2 |
| y轴最大行程 | 36m |
| y轴移动速度 | 60m/min |
| y轴加速度 | 0.3m/s2 |
| z轴最大行程 | 2~6m |
| z轴移动速度 | 30~45m/min |
| z轴加速度 | 0.5m/s2 |
| 定位精度 | ±5mm |
t600 双臂型 空间物流机器人
使用金石桁架机器人技术的t600空间物流机器人,不仅在塑料板条箱、手提袋、箱子和容器中存储和检索订单履行所需的货物效率高,而且可以管理从接收到存储和拣选,再到包装和运输的仓库流程。
- 3~8 m
厂房高度
- 0.3~3 t
负载
- 9~18 m
跨度
- 2.5~4.8 m
手臂行程
- 无柜控制系统
- 标准化产品,最快一个月交期
- 多种行业适用
-
 轻小货物快速周转
轻小货物快速周转
 适用包装
适用包装 | 系列 | t600 | t600-mini | t600-pro |
|---|---|---|---|
| 最大负载 | 1.5t | 0.3t | 3t |
| x轴行程 | 200m | 200m | 200m |
| x轴移动速度 | 120m/min | 120m/min | 120m/min |
| x轴加速度 | 0.5m/s² | 0.5m/s² | 0.5m/s² |
| y轴最大行程 | 15m | 9m | 18m |
| y轴移动速度 | 60m/min | 60m/min | 60m/min |
| y轴加速度 | 0.5m/s² | 0.8m/s² | 0.5m/s² |
| z轴最大行程 | 3m | 2.5m | 4.8m |
| z轴移动速度 | 45m/min | 45m/min | 45m/min |
| z轴加速度 | 0.5m/s² | 0.5m/s² | 0.5m/s² |
| 定位精度 | ±5mm | ±3mm | ±5mm |
| 装机功率 | 60kw | 28kw | 90kw |
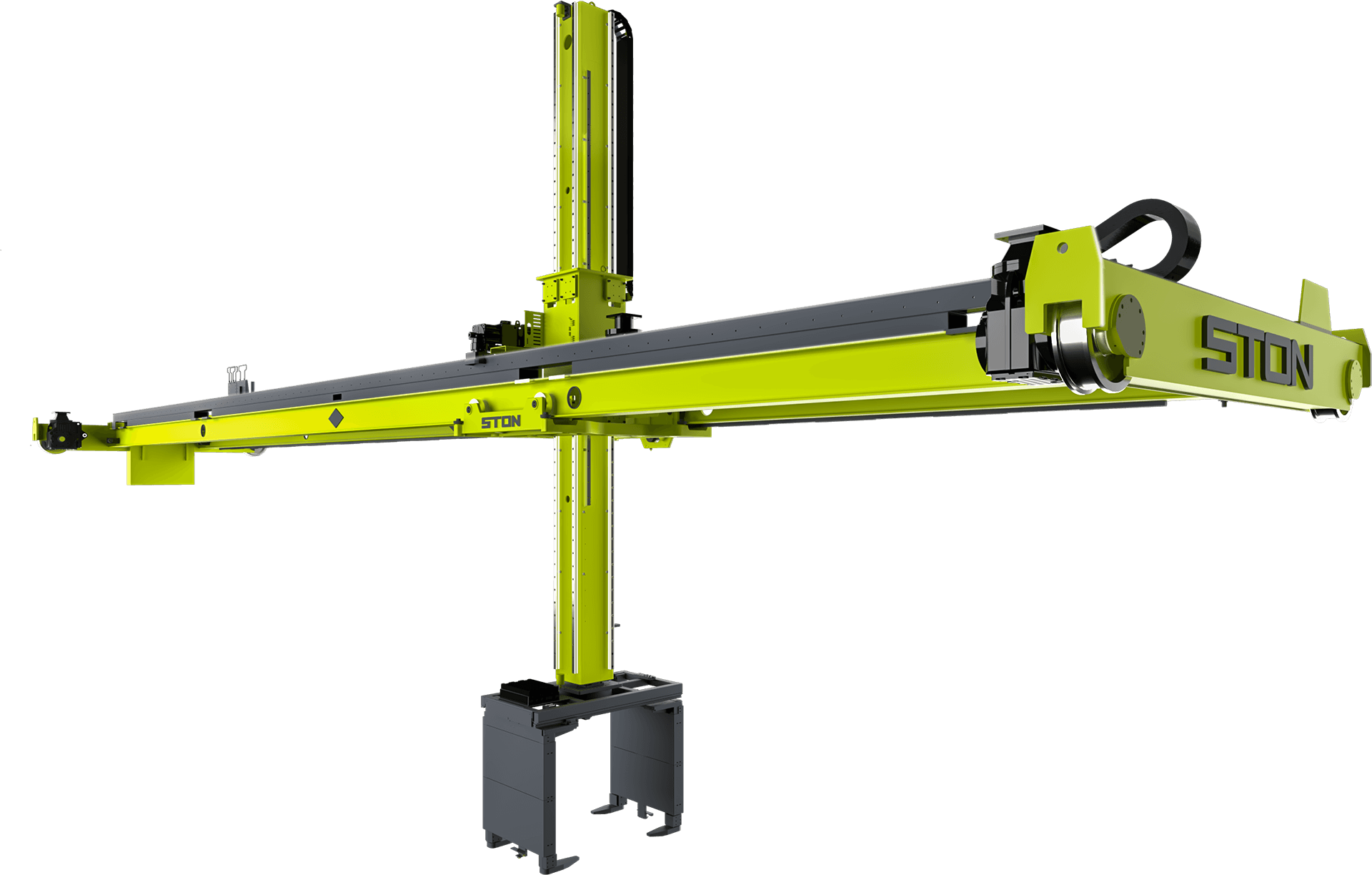
t200 单臂型 空间物流机器人
t200空间物流机器人主体采用铸钢件整体成型,不仅强度高不易变形,而且结构紧凑,生产周期短,零件标准化成度高,可以在单臂末端安装多种夹具,满足多场景的仓储加装车需求。
- 6~8 m
厂房高度
- 3 t
最大负载
- 30 m
最大跨度
- 2~4 m
手臂行程
- 无柜控制系统
- 标准化产品,最快一个月交期
- 全场景空中装车
- 根据需求选配定制抓手
 多种抓手适配
多种抓手适配 | 负载 | 3t |
|---|---|
| x轴行程 | 200m |
| x轴移动速度 | 120m/min |
| x轴加速度 | 1m/s² |
| y轴最大行程 | 28m |
| y轴移动速度 | 60m/min |
| y轴加速度 | 1m/s² |
| z轴最大行程 | 6m |
| z轴移动速度 | 45m/min |
| z轴加速度 | 2m/s² |
| 重复定位精度 | ±3mm |
s1500 伺服堆垛机
金石为生产制造、流通配送企业提供智能立库自动化及物流系统的规划设计、系统集成、软件开发、设备定制、电控系统开发、现场安装调试、客户培训和pg电子模拟器官网的售后服务等,帮助客户实现物料出入库、存储、搬运输送、拣选、配送等过程的自动化、信息化和智能化(wms和wos系统的开发与集成),提高效率,降低成本,为客户创造价值。
- 50~1000kg
负载
- 3~40m
高度
- 180m/min
水平速度
- 45~60m/min
提升速度
- 30~45m/min
货叉速度

- 全伺服驱动
-
 10000库位2个月交付
10000库位2个月交付 -
 快速交付
快速交付 - 齿轮齿条传动,精度高
-
 增加20%的储存量
增加20%的储存量 金石伺服堆垛机,比传统堆垛机增加20%的存储量。伺服双驱动,齿轮定位精度高,结构钢性强。
- 直流共母线电力再生技术
千兆等环网和共母线技术,节能40%。
- 驱控一体
不需要电气调试的控制系统,完美解决2个月交货的问题。
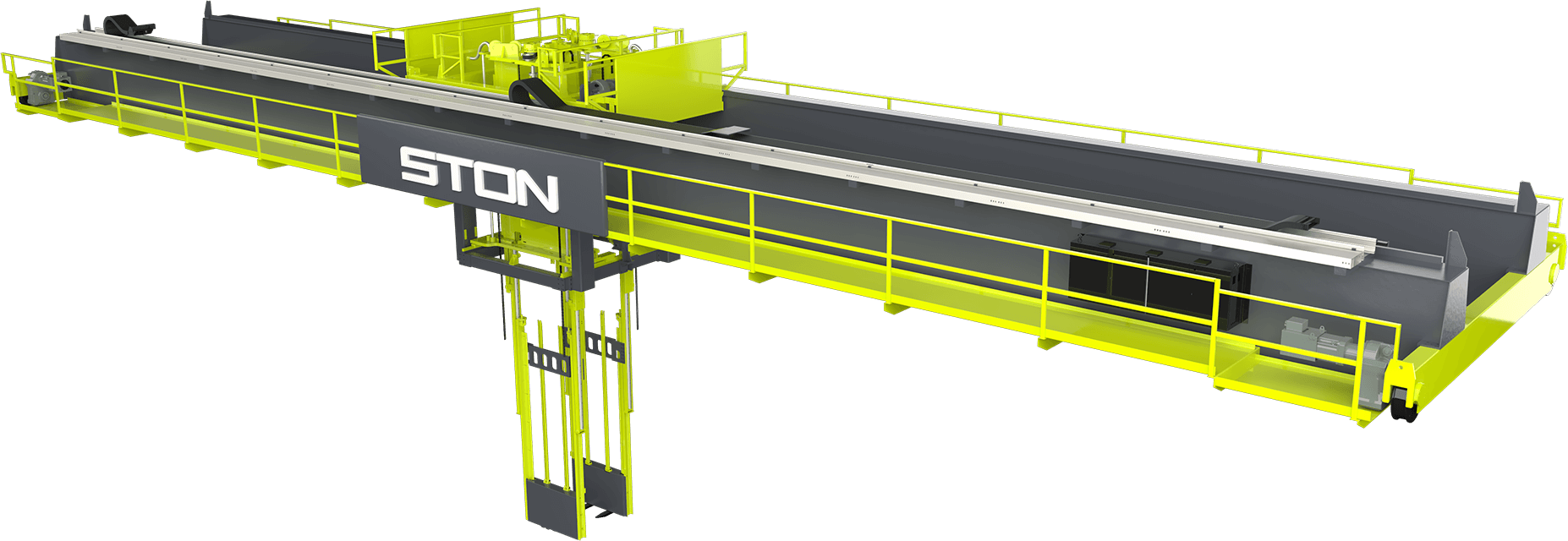
l7 滚筒式 装车机器人
金石装车机器人的装车方式是货物先在平台上排队备货,然后平台的载贯链板部分整体推入车厢,再将链板抽出,从而完成装车。装车机器人可以根据车厢在地面的位置,进行宽度、深度、高低方向进行变形,是一种自适应车厢的柔性装车平台,可以兼容市面上大部分车辆。
- 17.5 m
行程
- 2.25~2.5 m
装车宽度
- 35 t
最大负载
- 1.15~1.65 m
装车高度
- 无柜控制系统
- 自主适应车辆(高度、角度、位置调节)
- 适应多种货物形态
-
 5分钟装一车
5分钟装一车

| 最大负载 | 35t |
|---|---|
| 输送速度 | 15m/min |
| 输送加速度 | 0.2m/s² |
| 行程 | 13.5m |
| 升降行程 | 400mm |
| 平移行程 | 500mm |
| 旋转角度 | ±1° |
| 装车宽度 | 2250–2500mm |
| 装车高度 | 1150–1650mm |
| 最大装车长度 | 17.5m |
m7 货叉式 装车机器人
m7货叉式装车机器人专为川字托盘设计,全伺服自动调节高度,无需人工,通过链条驱动货叉,实现平台的推货功能。可与产线对接,可装可卸。
- 17.5 m
行程
- 15 m/min
货叉速度
- 35 t
最大负载
- 1.1~1.6 m
装车高度
- 无柜控制系统
- 自主适应车辆(高度、角度、位置调节)
-
 可装可卸
可装可卸 -
 川字托盘专用
川字托盘专用
| 设备占地 | 16x4m |
|---|---|
| 最大负载 | 35t |
| 装车高度 | 1.1-1.6m |
| 货叉速度 | 15m/min |
| 货叉行程 | 17.5m |
| 升降速度 | 12mm/s² |
| 升降行程 | 500mm |
| 平移行程 | 600mm |
| 平台旋转 | ±1° |
| 装车功率 | 60kw |
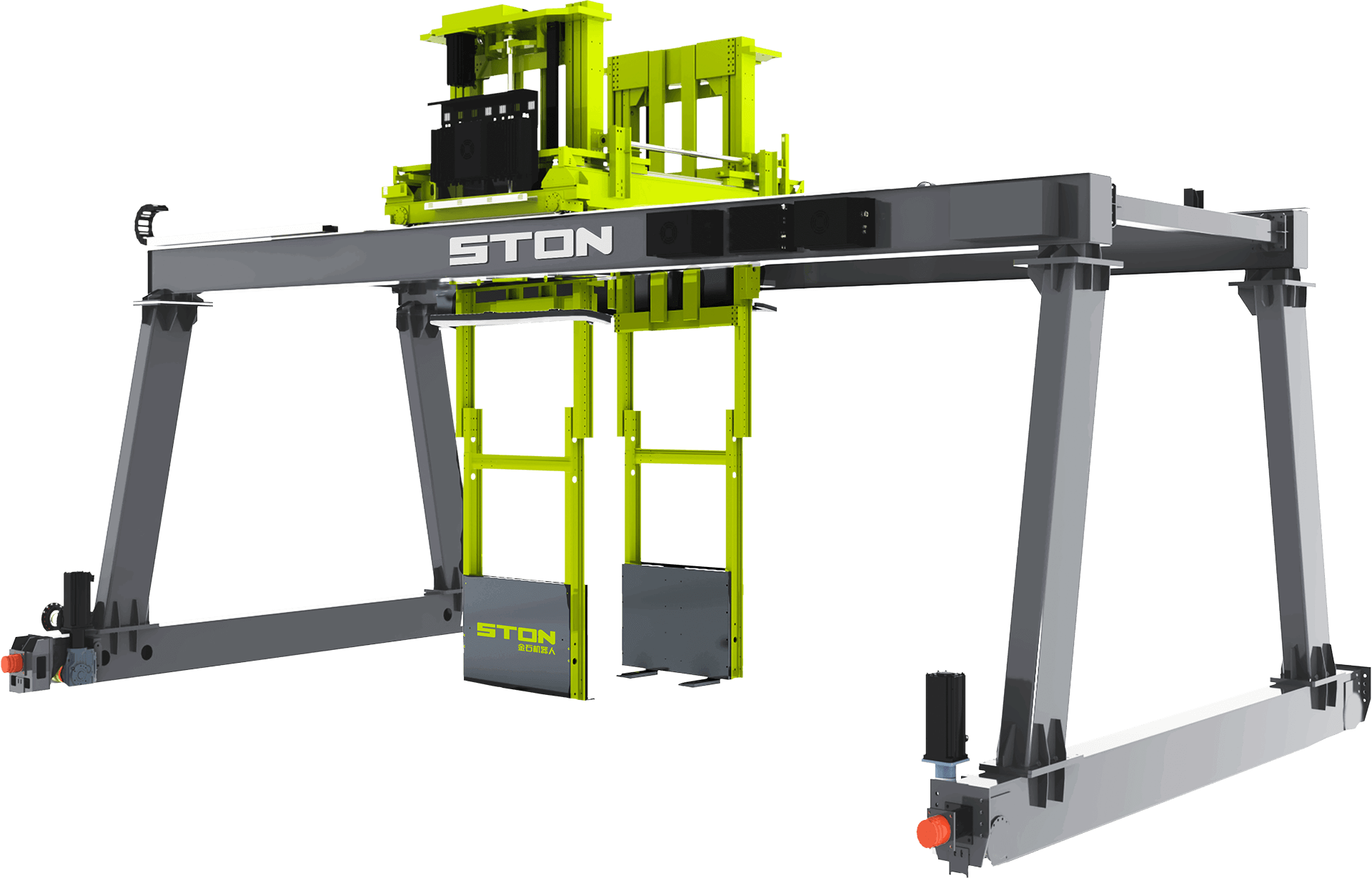
t900 巷道式 空间物流机器人
机械手臂具有电流环力控算法,可以自动感知货物状态。t900巷道式空间机器人针对低矮厂房品类多,货量轻等问题研发 无需设地面轨道,减小厂房改造,出库效率极高。
- 8 m
厂房高度
- 1.5 t
最大负载
- 30 m
最大跨度
- 6 m
手臂行程
- 无柜控制系统®
将体积庞大的电气控制柜浓缩到芯片中,免接线,免编程,免操作
- 低投入
无需设地面轨道,减小厂房改造
-
 高收益
高收益载量轻,出库效率高
- 适用范围广
适用于货物轻,体积小,多种类快速分拣
 适用包装
适用包装 | 最大负载 | 1.5t |
|---|---|
| x轴最大行程 | 200m |
| x轴移动速度 | 180m/min |
| x轴加速度 | 1m/s2 |
| y轴最大行程 | 15m |
| y轴移动速度 | 90m/min |
| y轴加速度 | 1m/s2 |
| z轴最大行程 | 3.5m |
| z轴移动速度 | 40m/min |
| z轴加速度 | 2m/s2 |
| 重复定位精度 | ±3mm |
| 装机功率 | 60kw |
物流堆场终结者工作现场




- 1/5 占地面积

- 1/3 硬件成本

- 1/10 每年使用成本

- 0519-83600100
-
 扫描关注pg电子游戏网站
扫描关注pg电子游戏网站